


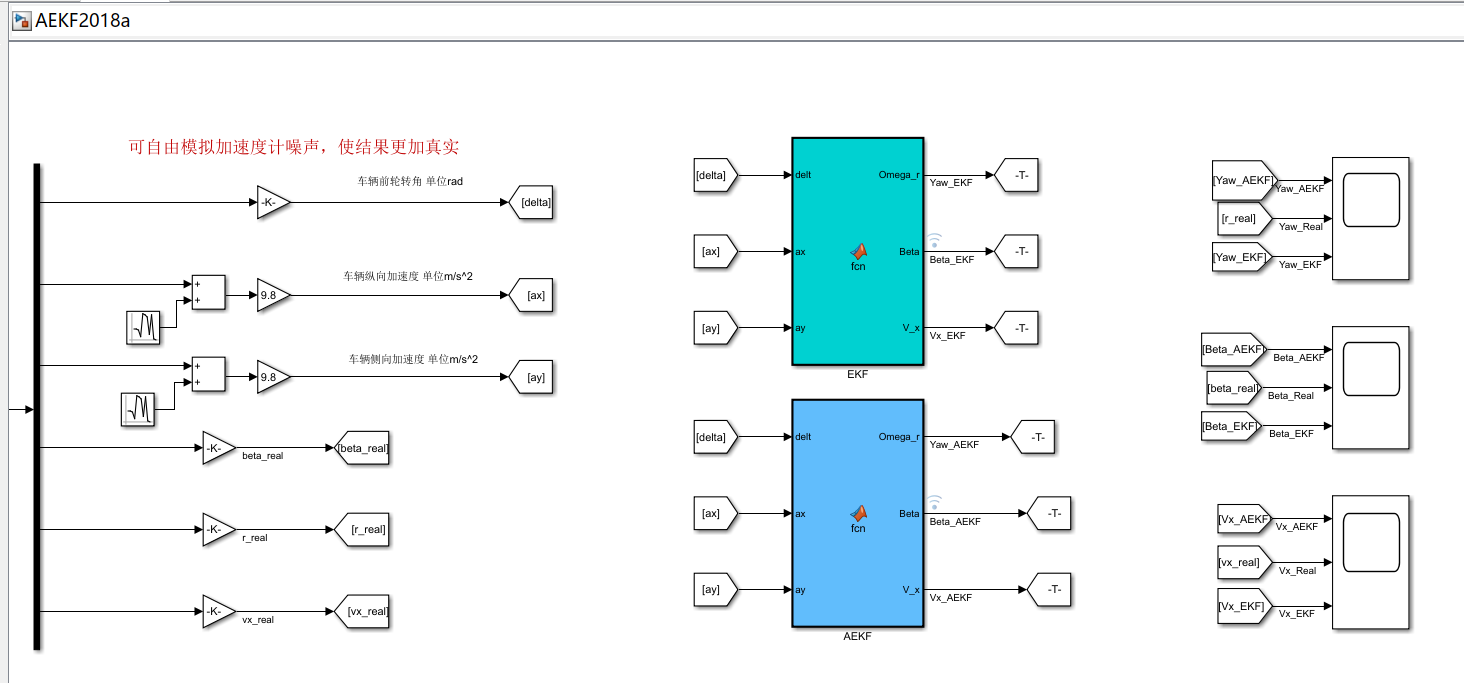
车辆状态估计模型EKF/AEKF,基于Carsim和simulink联合仿真。
在建立车辆三自由度模型(自行车模型加纵向)的基础上,
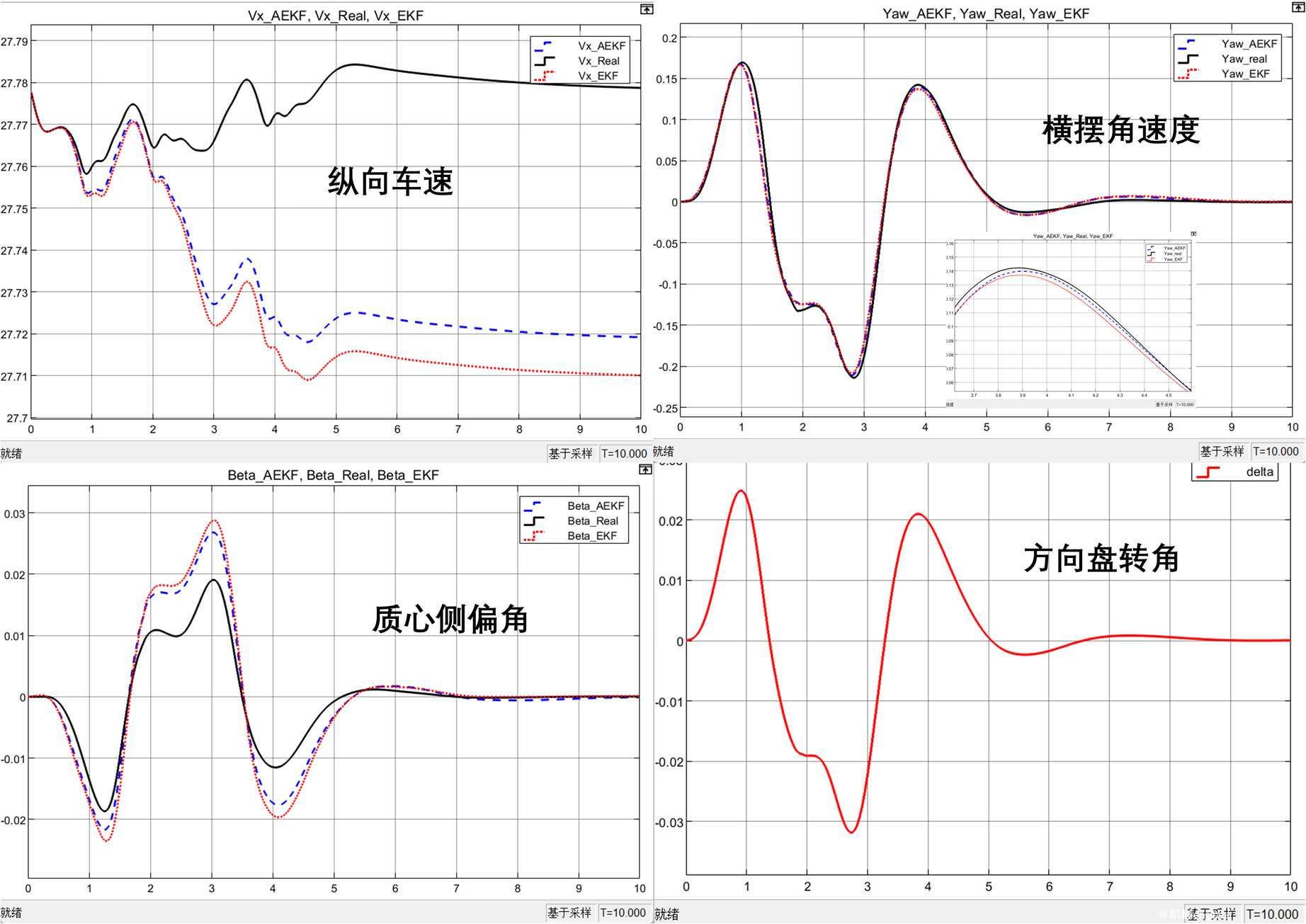
分别使用EKF和AEKF算法
对纵向车速,
横摆角速度,
质心侧偏角进行估计,
并进行结果对比。
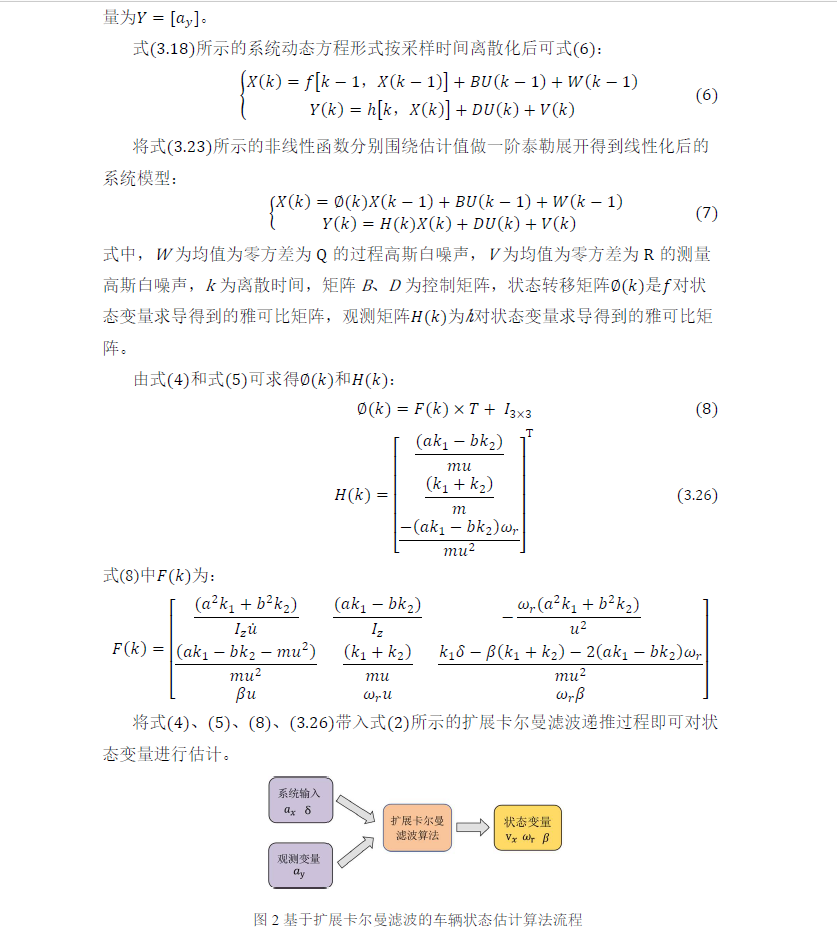
自适应扩展卡尔曼滤波采用sage-husa滤波中的噪声均值自适应策略
(代码中也含有噪声方差自适应的方程,因不适用该系统,已经注释掉,换成其他待估模型时可加上),
模型控制变量为[ax,δ],观测变量为ay。
使用Matlab function,通过定义静态变量编写,方便学习或修改为其他待估模型的扩展卡尔曼滤波/自适应扩展卡尔曼滤波。
文档详实,代码规范。
网盘链接:https://pan.baidu.com/s/1yRA2WuhTHF_qO53obA3j3Q
提取码:****
--来自百度网盘超级会员V6的分享
小提示:登录后刷新 微信支付6元即可查看网盘密码~
下载贤集网APP分享资料获得收益

分享到:







