


车辆状态估计,无迹卡尔曼滤波UKF车辆状态估计,扩展卡尔曼滤波EKF,无迹卡尔曼滤波UKF
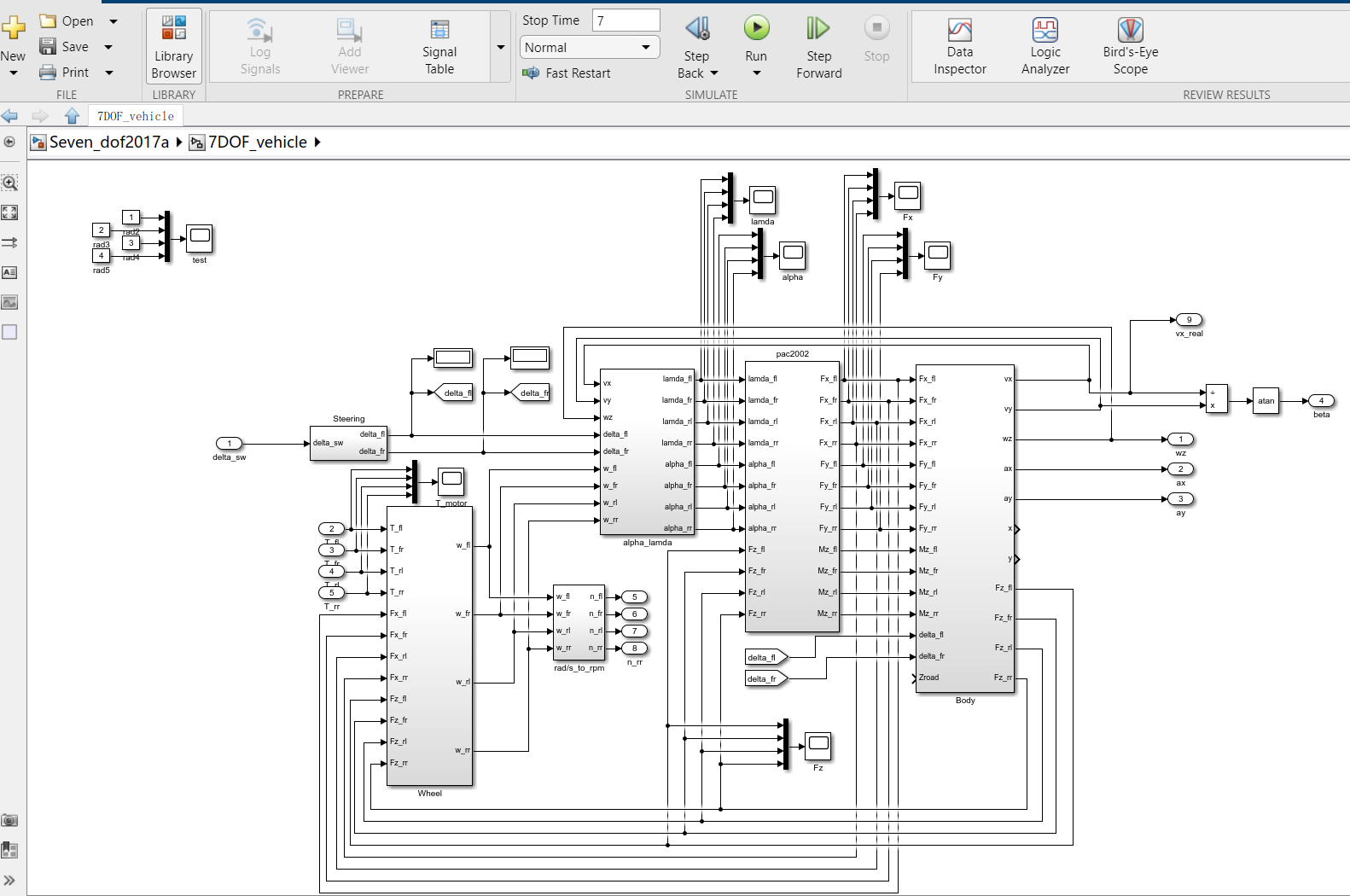
角阶跃输入+整车7自由度模型+UKF状态估计模型+附送EKF状态估计模型,
针对于轮毂电机分布式驱动车辆,对以下进行估计:
1. 车速,
2. 质心侧偏角,
3. 横摆角速度。
其中:
模型输入参数:方向盘转角delta,车辆纵向加速度ax
模型输出参数:横摆角速度wz,纵向车速vx,质心侧偏角β



网盘链接:https://pan.baidu.com/s/1DChf5zT-ACaocyRk35yEAA
提取码:****
--来自百度网盘超级会员V6的分享
小提示:登录后刷新 微信支付6元即可查看网盘密码~
下载贤集网APP分享资料获得收益

分享到:







